75 Pound Sumo
Concept In his senior year of high school, Rich took an engineering class that required a senior project. Rich enlisted two friends to build a 75 pound autonomous sumo to compete in the National Robotics Challenge for 2004. A proposal was made to the Explorer Post for funding. Since Flaming P'nut was built with over 100 pounds of steel, switching to aluminum while keeping the same drive train/control/sensors was the basic configuration. More speed would be a major improvement so it was decided to use two 12 Volt batteries to improve the speed from the sedate 32 inches per second of the 150 pound sumo. Many previous attempts to build a MOSFET control over 20 Volts resulted in a haze of magic smoke in the Brooks household. Fortunately, Roboteq had introduced a new, fully featured, serial driven motor control for a very little more money than the 72 MOSFETs in in Flaming P'nut. A quick review of the Roboteq data revealed a control structure that was well within the capabilities of high school students programming the Basic Stamp. |
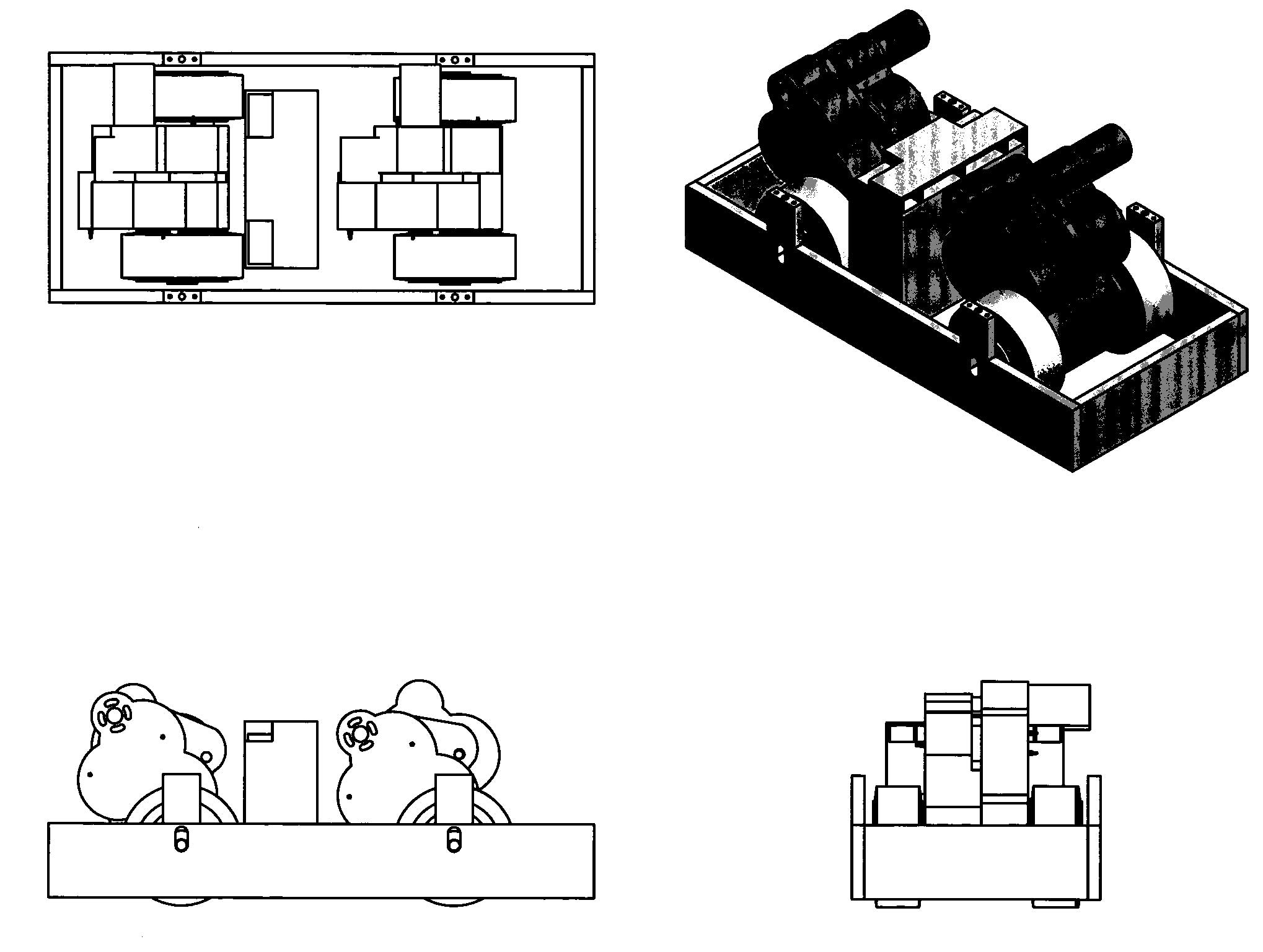 The first semester was the design phase of the project. The 150 pound sumo was completely disassembled and each part was entered into Autodesk Inventor. The battery, gear boxes, hubs, tires, and chassis parts were reproduced with amazing accuracy very quickly. The first semester was the design phase of the project. The 150 pound sumo was completely disassembled and each part was entered into Autodesk Inventor. The battery, gear boxes, hubs, tires, and chassis parts were reproduced with amazing accuracy very quickly. |
 A little stretching here and there and there was room for a second battery. The 75 pound sumo was taking shape in Inventor. A little stretching here and there and there was room for a second battery. The 75 pound sumo was taking shape in Inventor. |
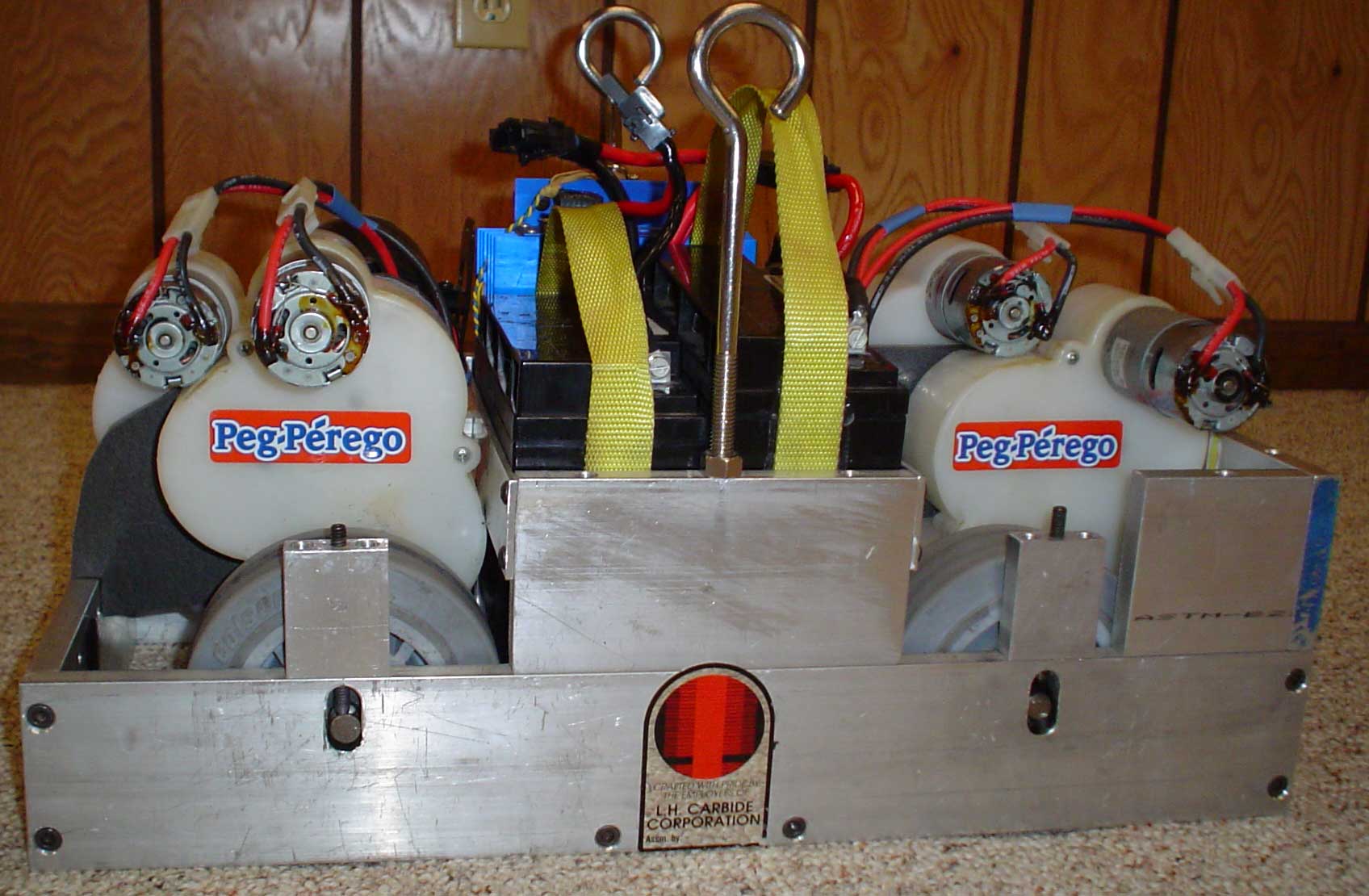
 The hubs would be a major machining problem. I do not know who did the
originals, nor what type of equipment was required to make the five sided cutouts for the Peg Perego gear box. Another high school
friend volunteered his father's and grandfather's machine shop. The Inventor file was taken to L. H. Carbide, checked by their Quality
Control group, and loaded into one of their machines. Fifteen minutes later, we had four perfect hubs. The hubs would be a major machining problem. I do not know who did the
originals, nor what type of equipment was required to make the five sided cutouts for the Peg Perego gear box. Another high school
friend volunteered his father's and grandfather's machine shop. The Inventor file was taken to L. H. Carbide, checked by their Quality
Control group, and loaded into one of their machines. Fifteen minutes later, we had four perfect hubs. |
 With the hubs in hand, the Roboteq control was ordered, as was the 1/2" X 3" 6061 aluminum. During January and February, 2004, all machining was done in the high school machine shop. With the hubs in hand, the Roboteq control was ordered, as was the 1/2" X 3" 6061 aluminum. During January and February, 2004, all machining was done in the high school machine shop. |
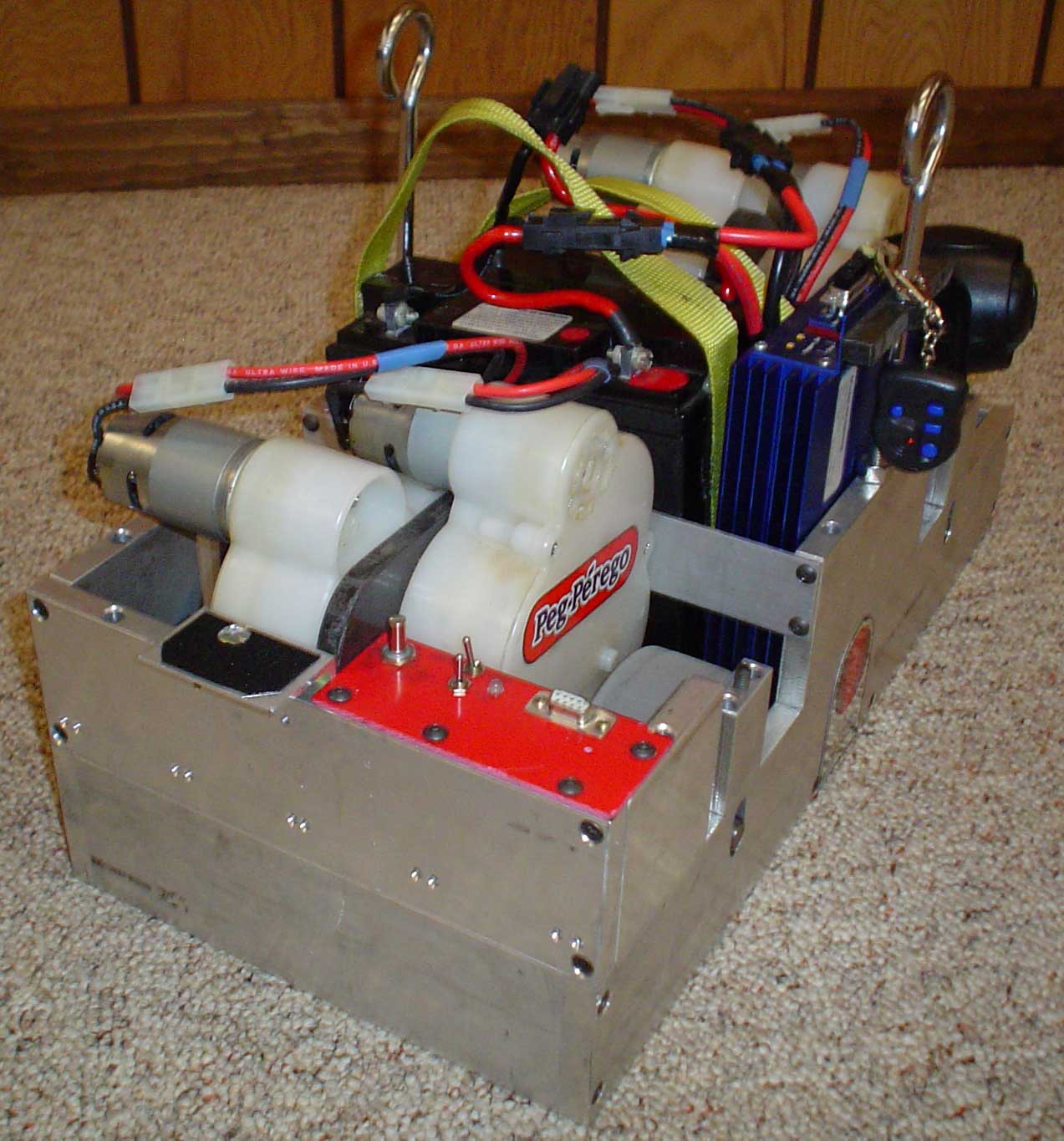
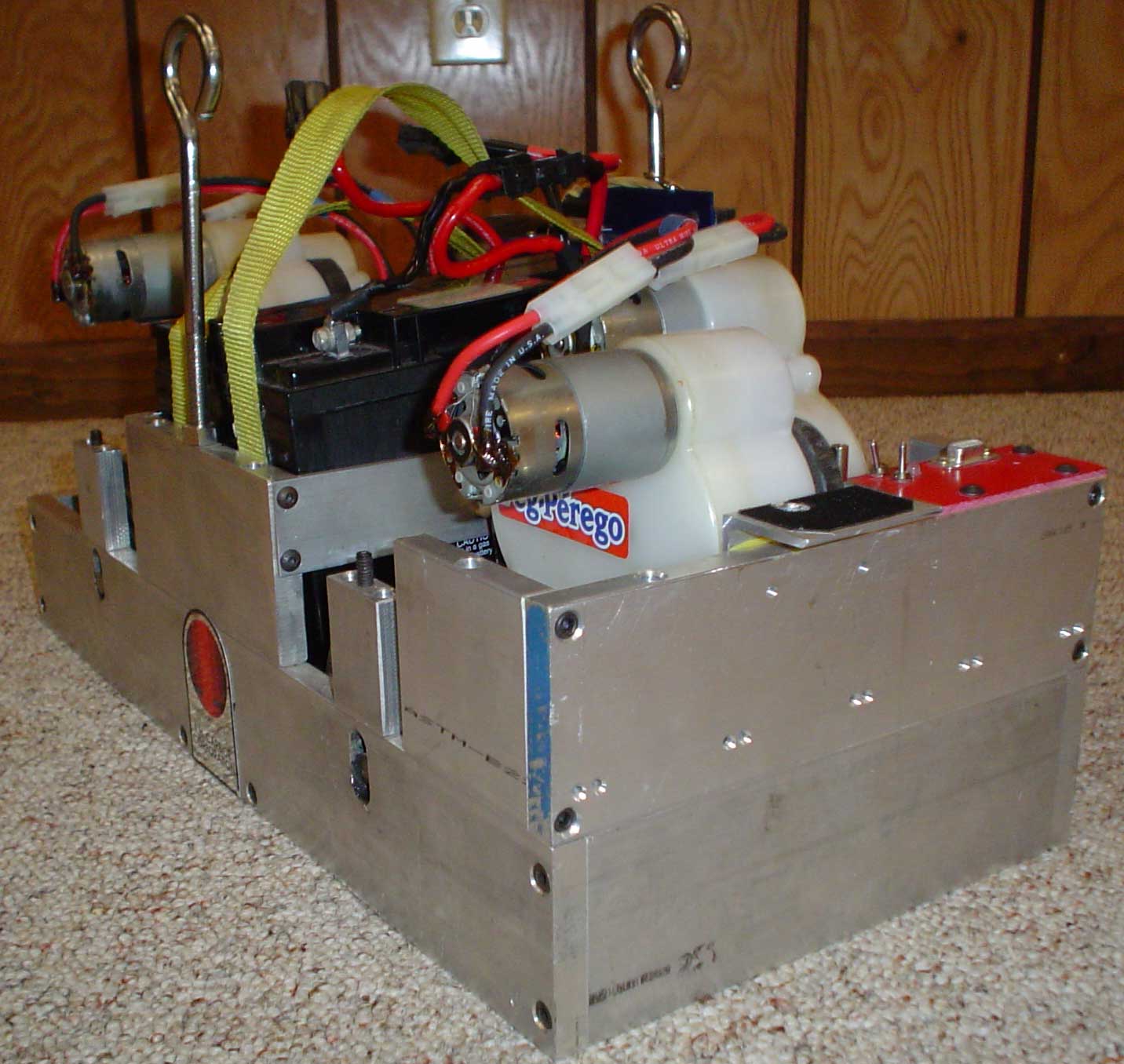
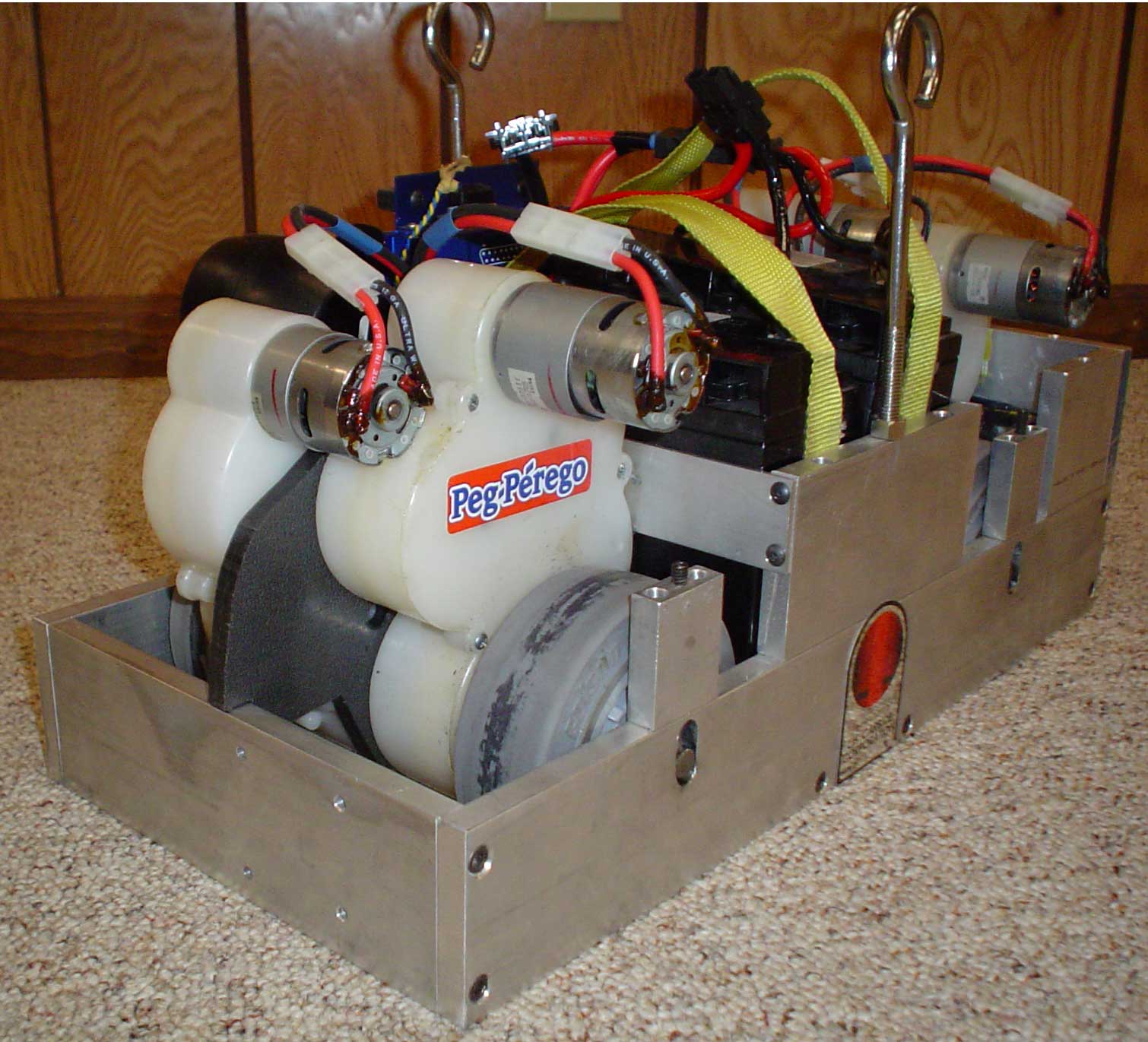
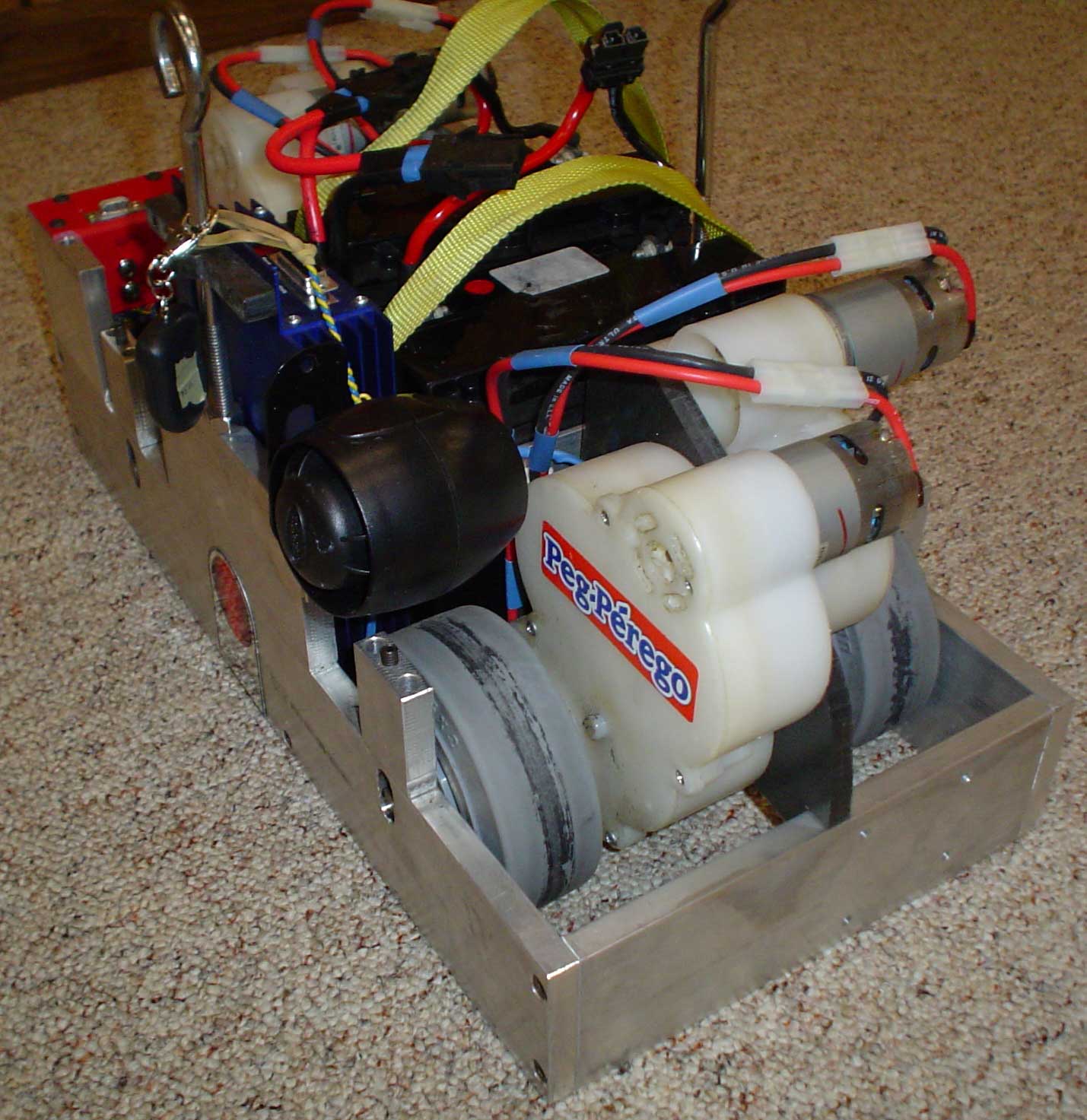
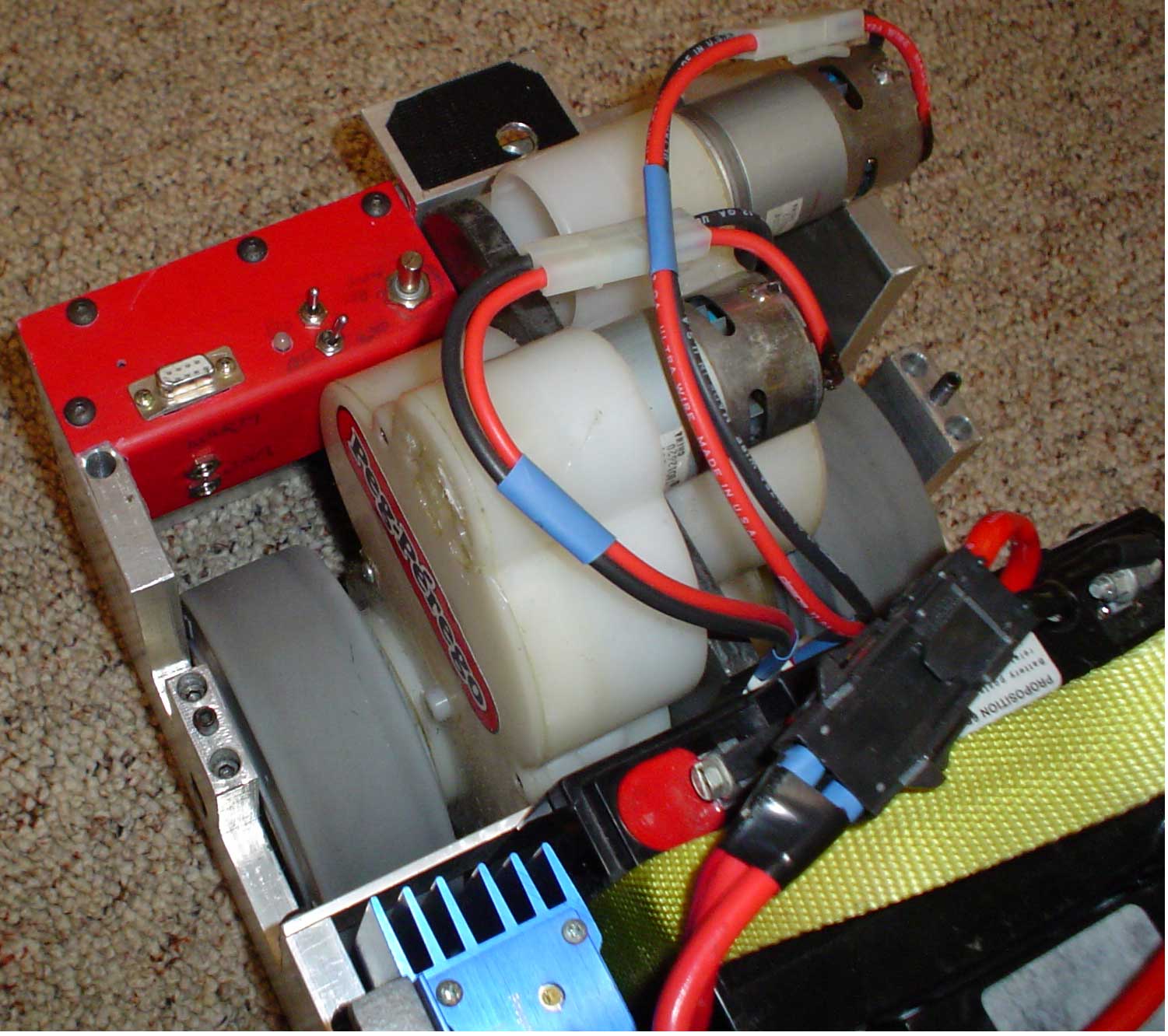
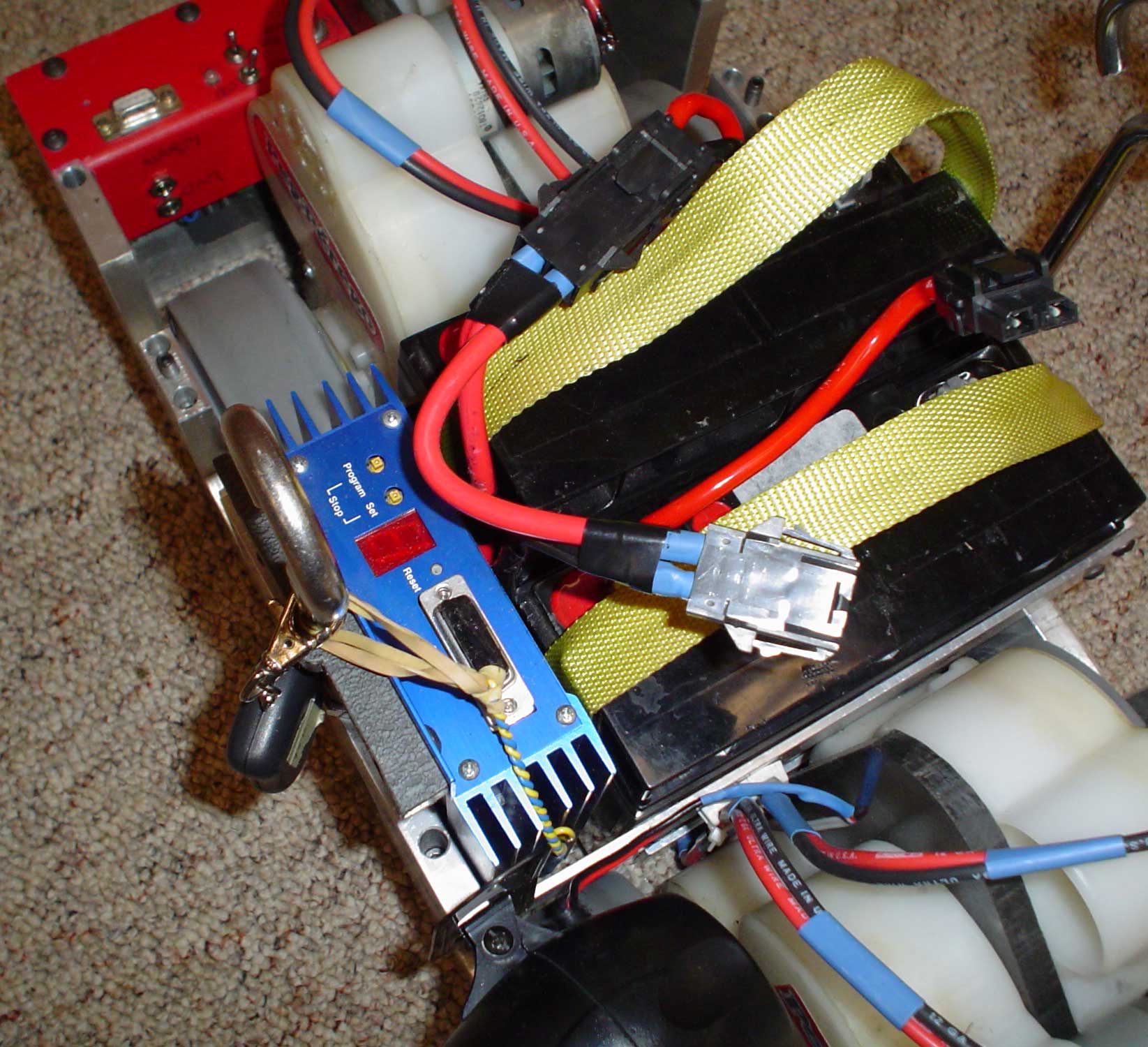
| During March, 2004, all of the parts came together: Colson wheels, stainless steel axles, Peg Perego gear boxes. Final mechanical assembly was completed on March 22 and the wiring was started. The front face of the robot pivoted down for easy access to the electronics. |
  By April 10 the wiring was complete and a few minor bugs were resolved. The robot was weighed for the first time and tipped the scales at 66.2 pounds. The speed test produced 69.3 inches per second (about 4 mph) which was substantially better than anticipated. By April 10 the wiring was complete and a few minor bugs were resolved. The robot was weighed for the first time and tipped the scales at 66.2 pounds. The speed test produced 69.3 inches per second (about 4 mph) which was substantially better than anticipated. |
The Final modifications before the Ohio trip were:
Graphogen lubricant between the stainless steel axles and aluminum hubs. Rewire the sonar jammer. All a 20 turn pot to more accurately control sensor distance. Minor changes to the 150 pound sumo software were required, mostly because of the higher speeds. |
|
|
A few videos of the 75 pound sumo at the 2004 competition are available. Rich is the one in shorts and sandals! Basically, the robot could not turn fast enough to keep up with the spinning robot, and lost twice (double elimination). Between the two losses, there were three major wins. Note for next year - work separate push strategy from search strategy so that a spinning sumo will not get to our side. Apply modified software to all sumo robots! A video of the 2005 National Robotics Competition shows the effectiveness of the software modifications. |